Introduction:
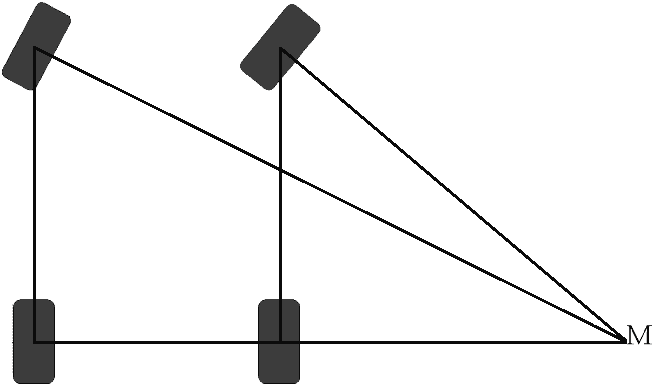
The front wheels do not steer at the same angle in a turn. The inside wheel will always have a “sharper” turn than the outside wheel. The image shows why this is the case.
The image shows that the lines from the front wheels converge at point M. Point M is the common pivot point for both front wheels. If the wheels were to turn at the same angle (where both wheels are in exactly the same position), the lines from the wheels would run parallel to each other into infinity, never finding the common pivot point M. As a result, the steering characteristics would be very poor in this situation. This entire principle is called “toe-out in turns.” All modern cars are constructed with this feature.
On smooth surfaces, e.g., the floor of a parking garage, you can hear the tires squeal when steering. This is due to this principle. The inner wheel, which makes a sharper angle than the outer wheel, will experience some form of slip. This is referred to as a steering error. More information about the steering error (and a graph) can be found on the page steering error.
This page explains how to calculate the steering angles (in degrees) of both front wheels using a number of parameters.
Calculating the Steering Angles:
The following vehicle data is needed to calculate the steering angles:
- Track Width
- Wheelbase
- Turning Circle Diameter
- Kingpin Distance (on this page, we keep the kingpin distance equal to the track width)
- Tire Size (depending on the calculation. On this page, calculations are done with the tire size, but calculations up to the bumper corners can also be made, in which case more angles are involved).
| Track Width = 1600mm | Wheelbase = 3200mm |
| Turning Circle Diameter = 13.225m | Kingpin Distance = Track Width = 1600mm |
| Tire Size = 225 | L and L’ = unknown |