ESP introduction:
ESP is an abbreviation for Electronic Stability Program and works in combination with ABS and ASR. When the vehicle is equipped with ABS (Anti-lock Braking System) and ASR/ASC (Anti Slip Regulation / Control), the ESP system can be added with the aid of several extra sensors and a software adjustment. The components such as the wheel speed sensors and the ABS pump / control unit are also used for the ESP system. The ESP system also ensures that the engine power is reduced; by closing the throttle further, or by cutting the ignition.
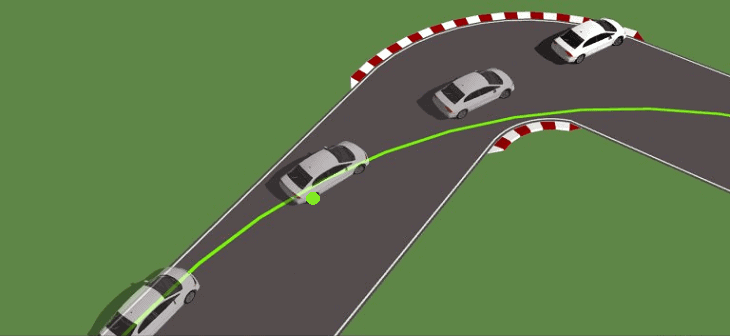
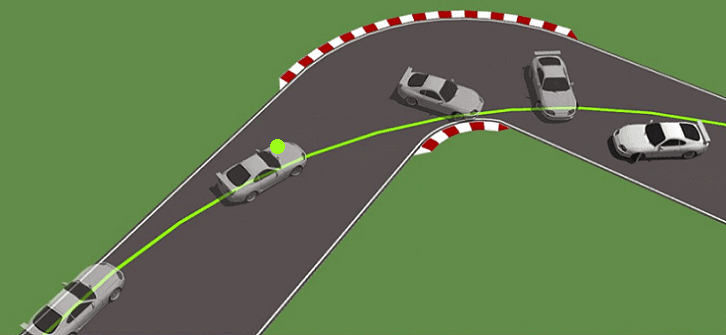
The purpose of the ESP system is to improve the cornering behavior (understeer and oversteer). This applies, among other things, to situations where braking occurs in a bend, or at the moment that an evasive maneuver takes place. The ESP system brakes one of the vehicle’s wheels so that normal steering characteristics are restored. Below, the two situations are shown in which the wheel indicated in green is braked. By braking, the vehicle will follow the green line instead of becoming uncontrollable. At the bottom of this page, various necessary ESP components are described.
Car manufacturers often use their own names for ESP for their models, even though the operation is the same. These alternative names are given to make the system appear more “luxurious” than the standard ESP. Examples are:
- ASC + T: Automatic Stability & Traction Control (older generation BMW before 1996)
- DSC: Dynamic Stability Program: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamic Stability and Traction Control (Volvo)
- ESP: Electronic Stability Program (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki, Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Vehicle Dynamic Control System (Subaru)
- VSC: Vehicle Stability Control (Lexus, Toyota)
- VSA: Vehicle Stability Assist (Honda)
Understeer:
Understeer occurs when the front tires no longer have sufficient grip on the road surface. The car will take a gentler curve than intended, so it will tend more to go straight on. The front wheels will therefore slide towards the outside of the corner. Understeer can be eliminated to ensure that the front wheels regain sufficient grip on the road. To do this, you can ease off the throttle a bit or reduce the steering angle. Steering more does not help against understeer; it can even make it worse because the wheels then have even less grip. Most car manufacturers set up the suspension so that the car tends to understeer rather than oversteer. The reason is that the average driver immediately releases the throttle in such a situation (which can be the solution that allows the car to regain grip).
Oversteer:
Oversteer occurs when the rear tires no longer have grip on the road surface. The rear tires of the car will start to slide towards the outside of the corner. The rear wants to overtake the front, causing the vehicle to start rotating around its axis. Oversteer can be corrected by countersteering and easing off the throttle in rear-wheel drive cars (e.g. BMW) and by giving a little more throttle in front-wheel drive cars (e.g. Volkswagen). In many cases, especially in motorsport, oversteer is deliberately used to drive more easily and faster through a series of corners. In an extreme case, this form of oversteer is called “drifting”. Oversteer is generally more dangerous than understeer, because most motorists are less able to correct it quickly. That is why, when designing the car, the suspension is set up more towards ‘understeer’, because that is easier to correct.
Steering angle sensor:
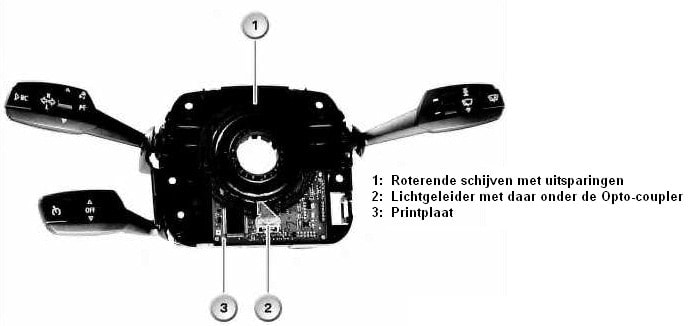
The steering angle sensor is mounted on the steering column. That can be at the steering gear, but also in the interior between the indicator / windscreen wiper stalks, as can be seen in the image on the right. These are the steering column switches of a BMW.
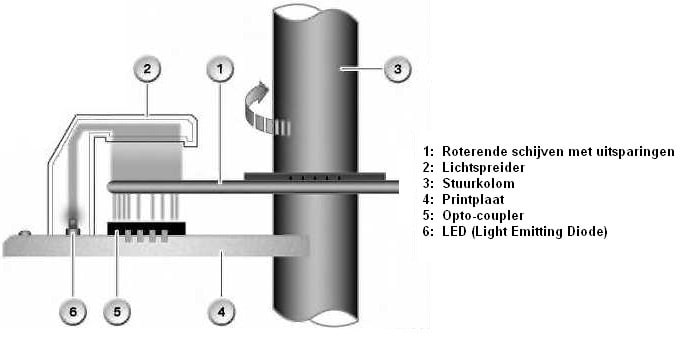
The task of the steering angle sensor is to measure the steering wheel’s angle of rotation. This sensor uses one or more opto-couplers that measure the light permeability of the rotating discs. At every point on a rotating disc, the light slots differ, allowing the exact position of the steering wheel to be recognized. All of the recesses in the discs result in an asymmetrical square-wave signal. The opto-coupler can convert a light signal into a voltage, which is then passed on to the control unit.
Lateral acceleration sensor (G-sensor):
The lateral acceleration sensor (also called the G-sensor, after the G-forces) is mounted as close as possible to the center of the car. When cornering, the movable plate (see figure below, number 2) shifts between the capacitors (1). There is a voltage of 5 volts across the capacitors. When the plate is in the middle (i.e. when the car is driving straight ahead) the voltage on both capacitors is 2.5 volts. When the car takes a corner (to the left in the case of the illustration), the plate shifts to one side as a result of the centrifugal force and the centripetal force.
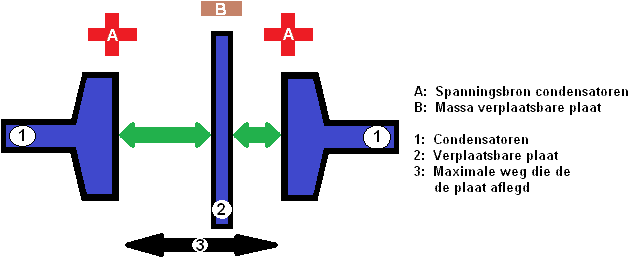
When the plate shifts, the capacitance of the right-hand capacitor decreases. Its voltage will now no longer be 2.5 volts, but for example 1.5 V. The ESP control unit detects the difference between the two capacitors and can deduce from this how great the centrifugal or centripetal force is (so how sharp the corner is. In this way it can be determined, for example, whether the car is oversteering). The values of this lateral acceleration sensor are compared with the data from the wheel speed sensors, and it is then determined whether the ESP system must intervene.
Yaw moment sensor (Yaw sensor):
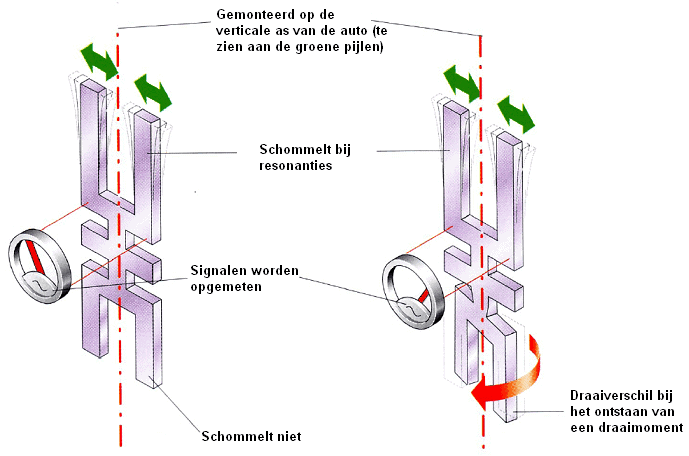
The yaw moment sensor, also called the “Yaw sensor” in English, is, together with the lateral acceleration sensor, mounted as close as possible to the center of the car. The sensor provides data that the ESP system needs. The yaw moment sensor registers the tendency of the vehicle to rotate around its vertical axis. The value of this measurement is called the yaw rate and is expressed in degrees per second.
The sensor consists of two tuning forks. The upper tuning fork is made to vibrate (resonate) at 11,000 Hz (11 kHz) by an alternating voltage and rotates when the vehicle drives through a bend. The sharper the curve, the more the lower tuning fork twists relative to the upper fork. The principle is based on gyroscopic forces (Coriolis force). When the rotating part is twisted out of its position, gyroscopic forces arise. Hence the name yaw moment sensor.
Due to the torsion, a piezo element generates a voltage difference that is measured by the control unit. The voltage generated varies between 0 and 5 volts. In the rest position (when no rotation is registered) the sensor outputs 2.5 volts.
Brake pressure sensor:
Separate hydraulic pressure sensors are also added to the braking system (in both circuits), which can be seen in the images below. In older cars, these sensors are located in the brake lines. These days, the brake pressure sensors are usually integrated into the hydraulic unit of the ABS system itself. This unit is often visible under the bonnet. All hydraulic brake lines are connected to it.

