Introduction:
Electric motors in vehicles with fully electric or hybrid drivetrains operate on alternating current (AC). The energy for the electric motor does not come directly from the battery, as it only supplies direct current (DC). The DC voltage from the battery is converted in the inverter into an AC voltage for the electric motor.
In addition, we find converters that raise a low DC voltage to a higher voltage (boost converter). The battery voltage can be “boosted” for the electric motor (650 volts), or stepped down to charge the on-board battery (14 volts). The converter is also used to step a high voltage down to a low voltage, to supply the interior accessories with 12 or 24 volts (passenger cars or heavy commercial vehicles). Click here for the page about the converter.
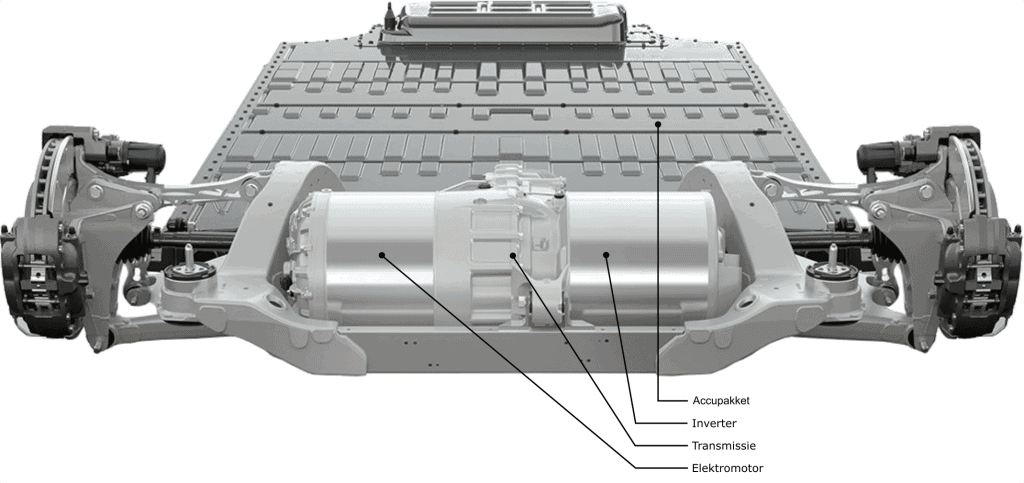
The following images are from a Tesla Model S: the internals of the inverter and an overview of the so‑called “drive unit”, in which the inverter, transmission and electric motor are housed in a single unit located at the rear wheel suspension.
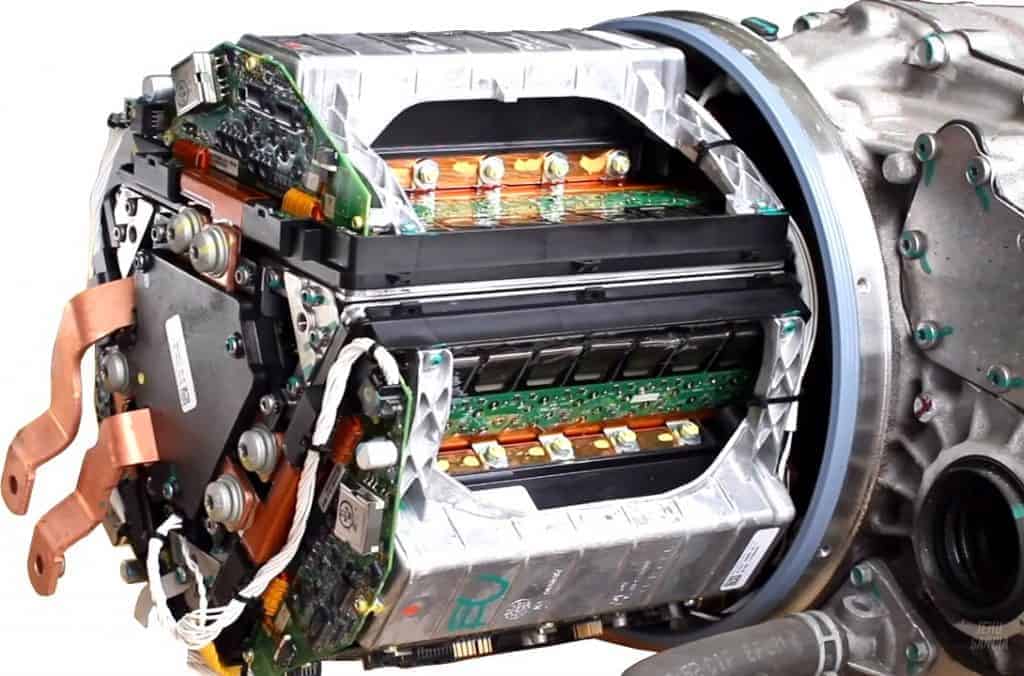
Inverter:
The image in the paragraph “Boost converter” shows the overview with the boost converter, the inverter with twelve IGBTs and two electric motors (MG1 and MG2).
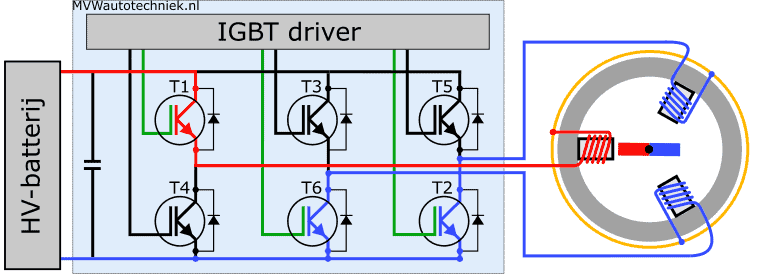
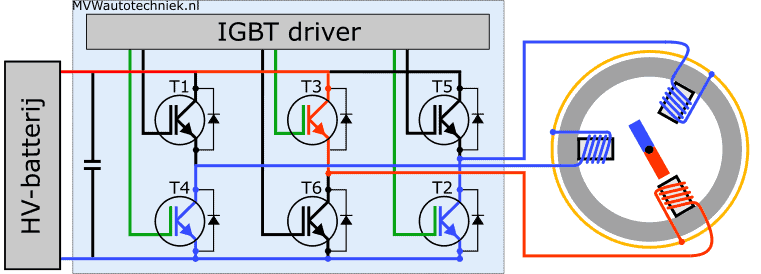
In the seven diagrams at the bottom, the control of the transistors and the current direction to and from the stator windings is shown. For simplicity, the boost converter and the IGBTs + MG2 are omitted. On the left side of the diagram we see the HV battery pack; this is the high-voltage battery in which a voltage of approximately 200 to 800 volts is stored. To the right of the battery we see a capacitor. When the HV system is activated, the HV safety system initially regulates a limited current from the HV battery pack by means of a resistor. This is done to slowly charge the capacitor before the HV system becomes fully operational.
We also see six high-power transistors. These are the IGBTs that control the electric motor. The IGBTs are controlled by the control unit; this is indicated as the “IGBT driver”. On the right we see the stator with three windings (U, V and W) which are colored blue and red. In the middle of the stator is the rotor, which is set in motion by magnetism; see the paragraph about the electric motor.
The upper transistors (T1, T3 and T5) switch the positive connections from the HV battery to the stator windings when the transistors are driven into conduction by the control unit. The lower transistors (T2, T4 and T6) conduct the grounds to the negative terminal of the high-voltage battery.
The gate connections of the IGBTs that are being controlled at that moment are shown in green. In a synchronous motor, the control unit “reads” the position of the rotor position sensor to determine which IGBT it must control. The rotor position sensor is also called a resolver.
1. Controlled IGBTs:
- T1: positive (100% controlled);
- T2: ground (50% controlled);
- T6: ground (50% controlled).
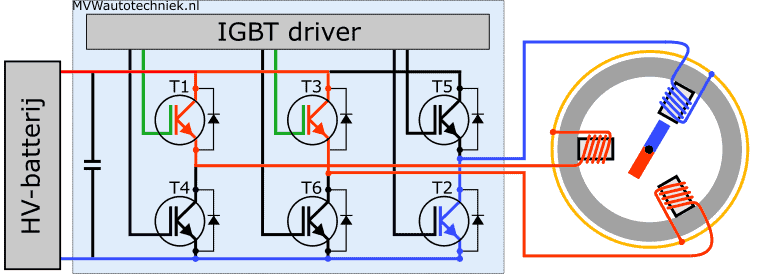
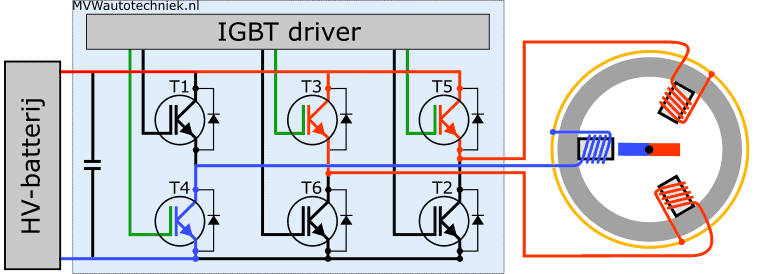
2. Controlled IGBTs:
- T1: positive (50% controlled);
- T3: positive (50% controlled);
- T2: ground (100% controlled).
The rotor rotates as a result of the changed magnetic field.
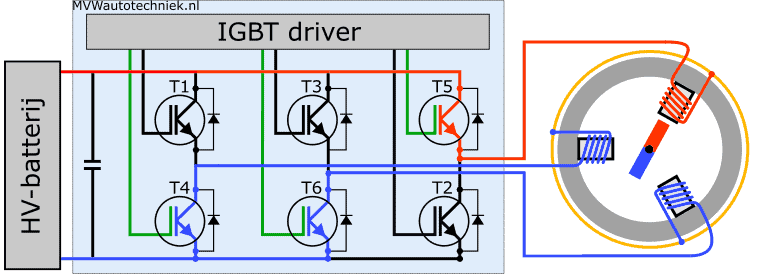
3. Controlled IGBTs:
- T3: positive (100% controlled);
- T2: ground (50% controlled);
- T4: ground (50% controlled).
The rotor rotates as a result of the changed magnetic field.
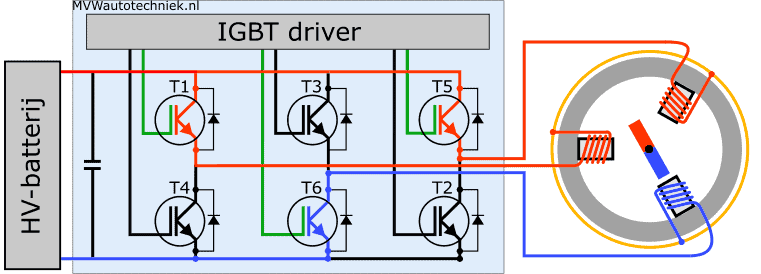
4. Controlled IGBTs:
- T3: positive (50% controlled);
- T5: positive (50% controlled);
- T4: ground (100% controlled).
The rotor rotates as a result of the changed magnetic field.
5. Controlled IGBTs:
- T5: positive (100% controlled);
- T4: ground (50% controlled);
- T6: ground (50% controlled).
The rotor rotates as a result of the changed magnetic field.
6. Controlled IGBTs:
- T1: positive (50% controlled);
- T5: positive (50% controlled);
- T6: ground (100% controlled).
The rotor rotates as a result of the changed magnetic field.
7. Controlled IGBTs:
- T1: positive (100% controlled);
- T2: ground (50% controlled);
- T6: ground (50% controlled).
The rotor has now rotated 360 degrees (1 full rotation) from the situation in situation 1. The cycle of transistor switching then repeats.
The inverter converts the DC voltage from the HV battery into a single-phase sinusoidal AC voltage. The three images below show:
- Left: charging of the coil;
- Middle: discharging of the coil;
- Right: charging and discharging curve of the coil.
We achieve the charging and discharging of the coil by controlling the base of the transistor with a square-wave voltage. When the coil discharges, the magnetic field collapses and a short induction current is created by the induced voltage. The freewheel diode ensures that the coil discharges.
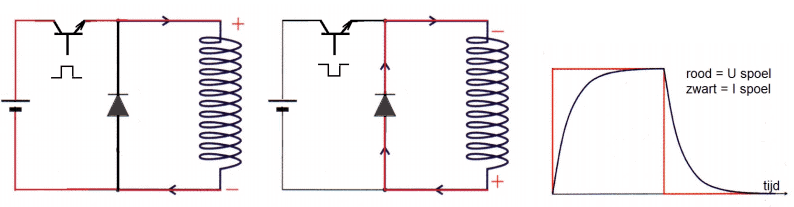
The single-phase sine wave is obtained by changing the duty cycle with which the transistor is driven into conduction. The following text refers to the images below.
- Left: with this frequency, the coil cannot charge sufficiently and an average voltage is created;
- Right: the duty cycle is adjusted by the IGBT controller. The charge and discharge time determine the magnitude of the current through the coil.
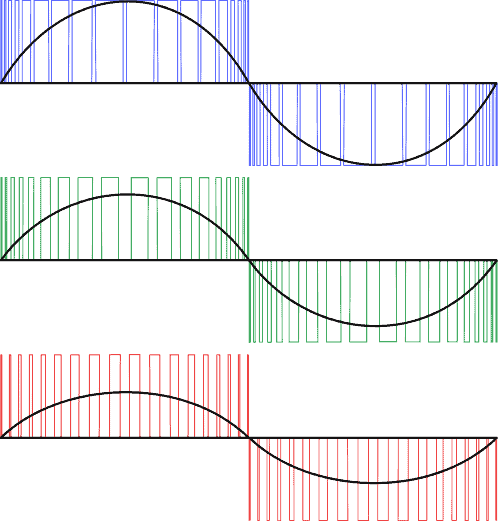
The IGBTs in the inverter are continuously switched on and off. The ratio between switching on and off is controlled according to a PWM control strategy. The wider the pulses (higher duty cycle), the greater the current flowing through the coil and therefore the more powerful the electric motor is. The average current is indicated by the black sine wave. The following image shows three sinusoidal control signals:
- Blue: high control. The duty cycle is high. The current is at its maximum.
- Green: medium control. The duty cycle percentage is lower than with high control. The current is therefore lower.
- Red: low control. Again the duty cycle percentage has decreased. The current has been halved compared to maximum control.
The sine wave is one half-period positive and the other half negative. The IGBTs in the DC-AC inverter are switched in such a way that an alternating voltage (AC) is produced from a direct voltage (DC). The current direction through the stator windings is periodically reversed.
by increasing the number of sine waves per unit of time, the rotor speed increases.
The following animation shows the control of the inverter. Below the inverter you can see the time course of three phases. In the animation, the rotor makes two complete revolutions (360 degrees). Each rotation is divided into six time units (1 to 6). Below that you see colored bars:
- Dark blue: T1
- Green: T2
- Light blue: T3
- Orange: T4
- Pink: T5
- Red: T6
We focus on the first half revolution of the time course:
- From 0 to 180 degrees, the rotor makes a half revolution. During this period, IGBT T1 is controlled.
- Between 0 and 60 degrees, in addition to T1, T5 and T6 were also active.
- T1 switches the positive, T5 and T6 the ground. Each transistor had its own duty cycle, varying between 50 and 100%.
- At 60 degrees, T2 takes over from T5: the current direction in the winding is reversed.
- At that moment there is AC voltage: because the current direction has changed, the current is negative.
To control the correct windings in the AC synchronous electric motor with the inverter, the inverter looks at the signal from the resolver. The resolver registers the position of the rotor both at standstill and while rotating.
Regenerative braking:
When decelerating on the motor, the electric motor is used as a generator (dynamo). The kinetic energy of the vehicle is converted into electrical energy: the battery is charged.
The IGBTs are switched off during regenerative braking: the driver does not control them. The rectifier diodes between the source and drain of the IGBTs function as a rectifier to convert the AC voltage from the motor into DC voltage for the battery.
Fully electric and hybrid vehicles, in addition to the possibility of electric braking, also have a conventional hydraulic braking system to brake with brake pads and brake discs. The various techniques and control principles can be found on the page: braking of electric vehicles.