Topics:
Driving assistance:
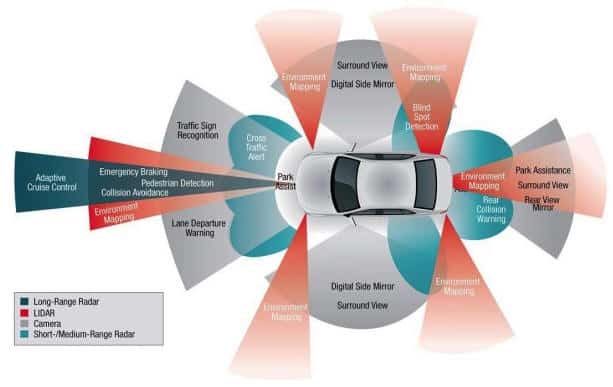
Systems that fall under the term “driving assistance” support the driver while driving. In general, driving assistance is intended to increase safety. Often, several systems work together to achieve the desired effect. The following systems can be classified under driving assistance:
- LDW (Lane Departure Warning). Function: warning when crossing the lane markings;
- TSR (Traffic Sign Recognition). Function: recognising traffic signs and alerting the driver to them;
- ACC (Active Cruise Control). Function: automatically maintaining distance to the vehicle in front;
- BSD (Blind Spot Detection). Function: warning when there are vehicles in the blind spot;
- ALC (Adaptive Light Control). Function: automatically switching the lights on and off and sometimes also rotating the reflector;
- Pre-crash systems. Function: automatic braking to prevent collisions;
- Pedestrian detection. Function: pedestrian detection;
- Rain/light detection. Function: automatically switching the wipers on and off when rain is detected;
- HDC (Hill Descent Control). Function: downhill assistant;
- Hill hold/start assist. Function: operating the parking brake when stationary on a hill and releasing it again when driving off;
- Surround view system. Function: all-round vision system by means of several cameras;
- Adaptive high beam / curve lighting. Function: anti-dazzle system for oncoming traffic;
- Automatic parking. Function: automatic parking system;
- Driver drowsiness detection. Function: detection of the driver’s alertness, e.g. falling asleep.
- Navigation system. Function: navigating to the specified destination. In a hybrid car, the state of charge can be adjusted to the specified route.
A combination of the above-mentioned systems forms a basis for an autonomously driving car. Components such as radar, video cameras and ultrasonic sensors form an extension of the previously mentioned systems.
Radar:
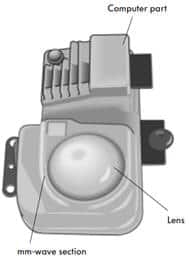
Radar has been used for several years to control automatic speed, braking and safety systems in response to sudden changes in traffic conditions. The main task of the radar sensor is to detect objects and then determine their speed and position relative to the vehicle on which the sensors are mounted. To achieve this, the radar sensor has four antennas that simultaneously emit radar waves at a frequency usually between 76 and 77 GHz. These waves are reflected by the object and then picked up again by the antennas. By comparing the phase differences and amplitudes of the signal echoes, the positions of the objects can be determined.

The table below shows the different automotive applications for which radar is used.

A distinction is made between three types of radar systems: Short-, Mid- and Long-range radar.
- Short-Range Radar (SRR)
Reversing into a parking space: during automatic parking, ultrasonic sensors are too slow to allow the computer to detect the distance between two cars, so SRR is also used here.
Pedestrian recognition: even in situations with poor visibility, the system intervenes when a pedestrian approaches. If there is no timely reaction, the vehicle will automatically brake.
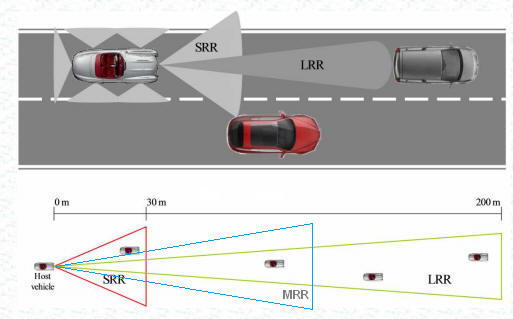
- Mid-Range Radar (MRR)
Cross Traffic Alert: when the driver reverses out of the parking space in a situation with good visibility, the system warns of approaching vehicles (see image below).

- Long-Range Radar (LRR)
Active Cruise Control (ACC): with a range of 150 to 250 metres and vehicle speed detection from 30 to 250 km/h, LRR is suitable as a radar system for active cruise control. The distance to the vehicle ahead can be set by the driver. Often there are 4 to 8 stages possible. Each stage represents a number of metres. The operation of active cruise control is explained below.
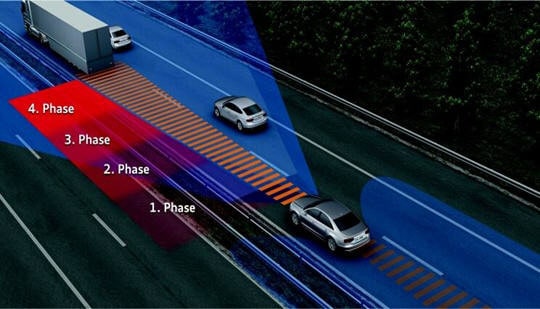
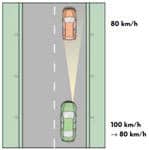
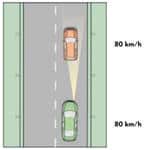
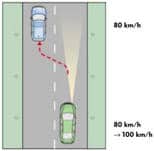
The Automatic Distance Control (ADC) is therefore able to perform a braking intervention when an object is detected. The images below are of the ACC (Active Cruise Control) of a Volkswagen Phaeton.
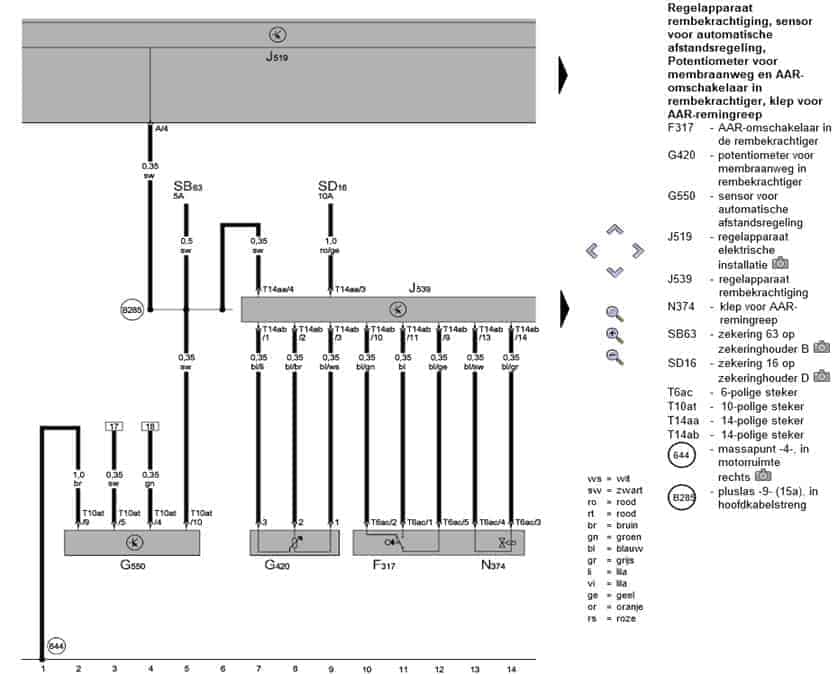
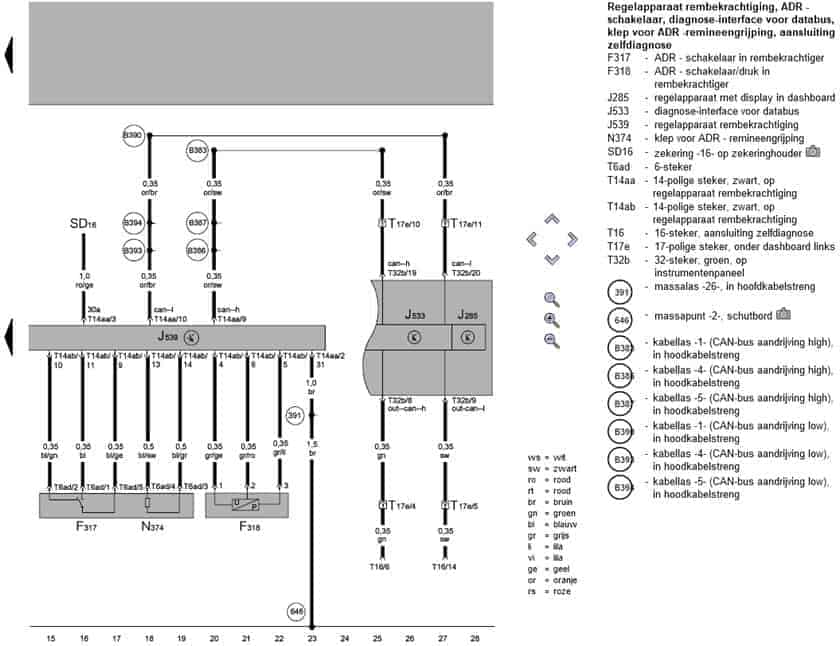
The electrical installation of the ACC is shown in the following diagrams. G550 is the sensor for the automatic distance control. The wires from pin 4 and 5 refer to 17 and 18 in the next diagram.
Reference is made to positions 17 and 18 in the diagram below. These turn out to be CAN-bus wires (Extended Low) (B665 and B666) that are connected to control unit J533. Via CAN-bus drivetrain high (B383 and B390), J533 communicates with J539 (brake booster control unit). In a following diagram, more connections to this control unit can be seen.
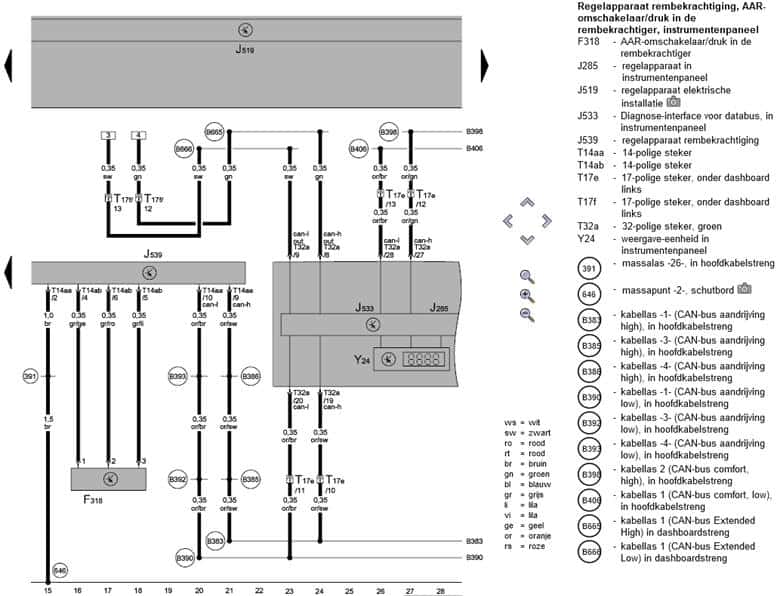
Control unit J539 controls the N374 valve for ADR (Automatic Distance Regulation) and the F318 (servo on the brake booster) for a braking intervention. Here as well, the wires CAN-high (B383) and CAN-low (B390) from the previous diagram can be seen.
Lidar:
LIDAR (Light Detection And Ranging or Laser Imaging Detection And Ranging) is a technology that determines the distance to an object or surface by using laser pulses. The operation of lidar is similar to that of radar: a signal is transmitted and will be received again some time later by reflection. The distance to this object is determined by measuring this time. The difference between lidar and radar is that lidar uses laser light, while radar uses radio waves. As a result, much smaller objects can be detected with lidar than with radar. The wavelength of radio waves is around 1 cm, while that of laser light is between 10 μm (IR) and 250 nm (UV). At this wavelength, the waves will be reflected better by small objects.
A lidar sensor emits a modulated, continuous infrared signal that is reflected by an object and received again by one or more photodiodes in the sensor. The modulated signal can consist of square waves, sinusoidal oscillations or pulses. The modulator sends the received signal to the receiver. The received signal is compared with the transmitted signal to check whether there is a phase difference and to check the time between transmission and reception. From this data, the distance to the object is determined.
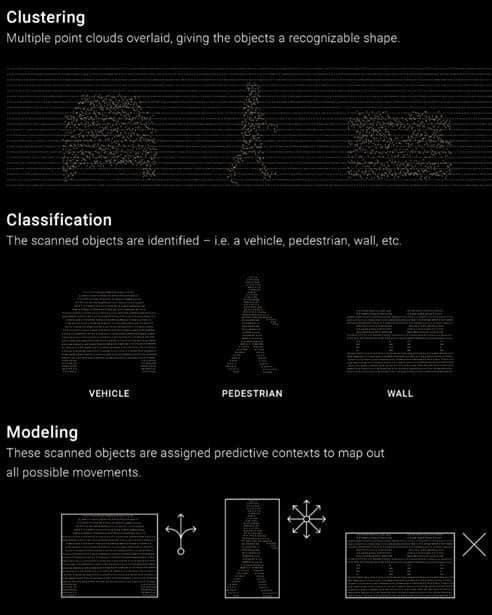
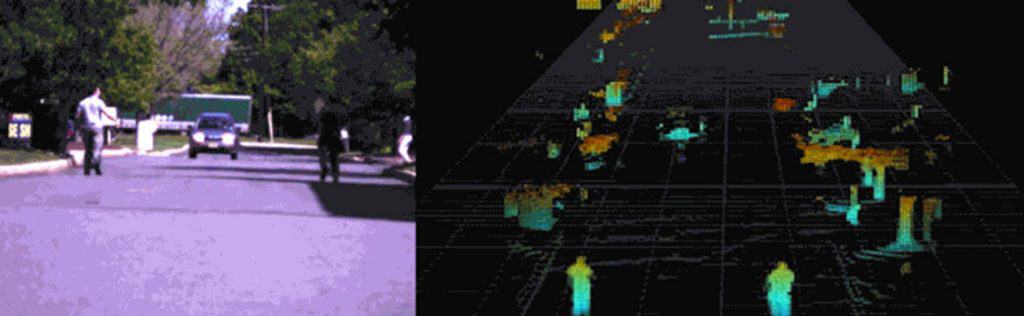
Lidar systems operate at the speed of light, which is more than 1,000,000 times faster than the speed of sound. Instead of emitting sound waves, they transmit and receive data from hundreds of thousands of laser pulses every second. An on-board computer registers the reflection point of each laser and translates this rapidly updating “point cloud” into an animated 3D representation of its surroundings.
Not only is the object displayed on a screen, the computer also estimates which movements the object can make. A vehicle can move quickly forwards and backwards, but not sideways. A person, however, can move in any direction, but at a relatively low speed. The lidar system takes a snapshot each time of the situation in which the car finds itself. In doing so, the driving assistance makes more than a hundred decisions every minute in order to drive safely.
The composition of a lidar sensor is as follows:
- Light source: this can be a laser, LED or VCSEL diode that emits light in pulses;
- Scanner and optics: these components guide the light to the outside via a mirror or lens. The lens focuses the reflected light onto a photodetector;
- Photodetector and electronics: the light is received by a photodetector, for example a photodiode. The electronics process the image data digitally;
- Positioning and navigation system: mobile lidar systems need a GPS system to determine the exact position and orientation of the sensor.
Autonomous driving with Lidar:
- Google combines lidar and radar;
- Intel relies entirely on camera technology.
- Agreement between manufacturers: they combine visual (camera) images with sensor information.
- When one system fails, the other technology will still detect and intervene to switch to a safe mode.