Control engineering:
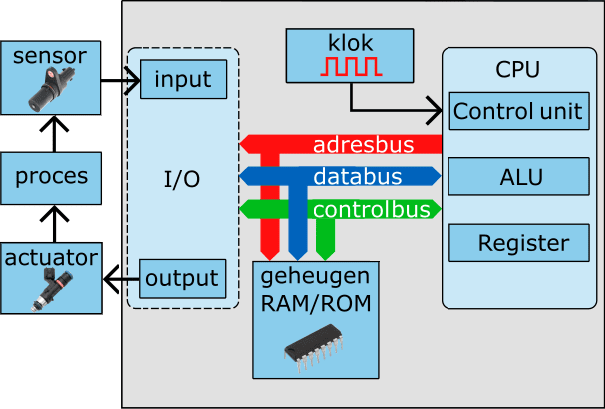
The ECU measures, actuates and controls the processes. The ECU receives information from sensors. A sensor converts a change in a physical quantity into an electrical signal. This sensor information enters the ECU via the input. Possible input signals originate from:
- engine speed sensor;
- temperature sensor;
- load (vacuum) sensor;
- oxygen sensor.
The information that comes in does not necessarily have to lead directly to an action. Only when a measured value deviates from the desired value can the control of the actuator be adjusted. The ECU then has a “controlling” function. By means of the pre-programmed computer program (ROM / flash memory), yes/no decisions are made.
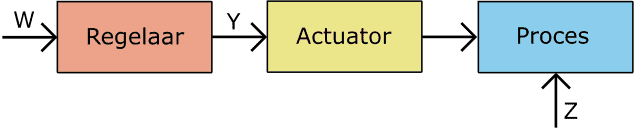
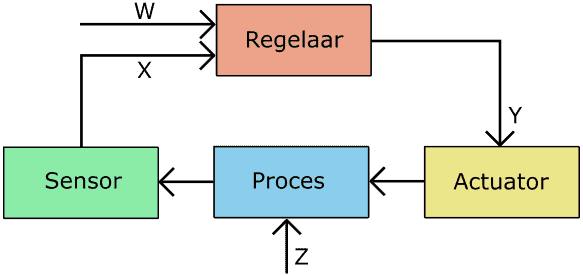
Measuring: the transducer, in this case a sensor, measures a physical quantity and converts it into an electrical signal. This measured value (X) is sent to the controller. The measured value does not necessarily have to lead directly to an action; think of a constant temperature.

Actuating: the controller (ECU) drives an actuator. There is no feedback from a sensor, so the ECU does not follow the course of the process. A fault in the process is therefore not always detected. An example of open-loop control is manually operating the horn (W); the ECU actuates the horn (Y) when the switch is operated. There is no monitoring function on the horn, so faults (Z) are not detected.
Controlling: the controller can process a manual command (W) or a measured sensor value (X) into an actuator control signal. The actuator causes a change in the process; think, for example, of the injection duration. Injecting more fuel means a richer mixture. The oxygen content is measured by the lambda sensor, which sends this measured value (X) to the controller. When an unforeseen fault is present (e.g. a blockage in an injector), this causes a change (Z) in the process. This deviation is also measured by the sensor, allowing the controller to adjust the process by means of the actuator control.
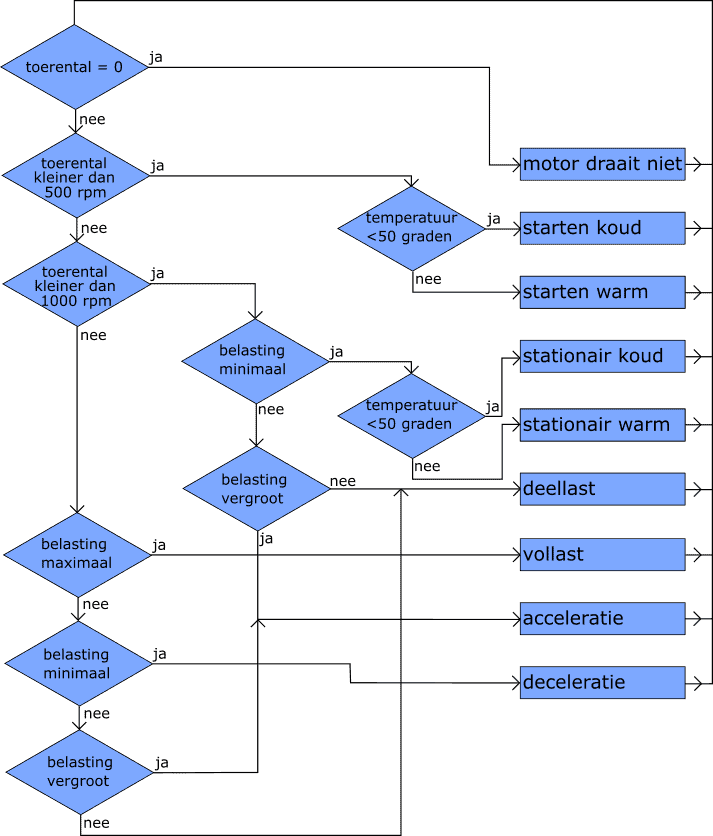
Process control based on operating conditions:
The engine management system of an internal combustion engine must ensure optimum mixture combustion under all operating conditions. Determining the mixture composition and the ignition timing is crucial for safeguarding the exhaust gas composition (emissions), fuel economy and achieving the desired power output.
Each operating condition has its own control strategy:
- Cold start: the mixture is rich and the ignition is retarded;
- Warm start: the mixture is less rich than during a cold start;
- Cold idling: mixture is rich and the idle speed is increased;
- Warm idling: mixture is less rich at a lower idle speed;
- Part load: stoichiometric mixture, speed range between 1500 and 4000 rpm, ignition timing is predefined, lambda control is active;
- Full load: mixture is enriched, load and engine speed are high;
- Acceleration: rich mixture, retarded ignition;
- Deceleration: lean mixture, advanced ignition.